국내 연구진이 개발한 4족 보행로봇 ‘라이보’가 계단이나 징검다리, 수직 벽 등에서도 고속으로 이동할 수 있는 등 성능이 향상된다. 연구진은 라이보가 재난 구조나 군사 정찰, 산악 탐사 등 사람이 접근하기 어려운 환경에서 임무 수행이 가능할 것으로 내다보고 있다.
3일 카이스트(한국과학기술원·KAIST)에 따르면 기계공학과 황보제민 교수 연구팀은 계단이나 징검다리 등 불연속적인 지형에서도 고속으로 이동할 수 있는 4족 보행로봇 내비게이션 프레임워크를 개발했다. 황보 교수팀이 개발한 4족 보행로봇 ‘라이보’는 모래, 얼음, 산악 등 다양한 지형에서 보행할 수 있어 감시·정찰 등 업무를 할 수 있다.
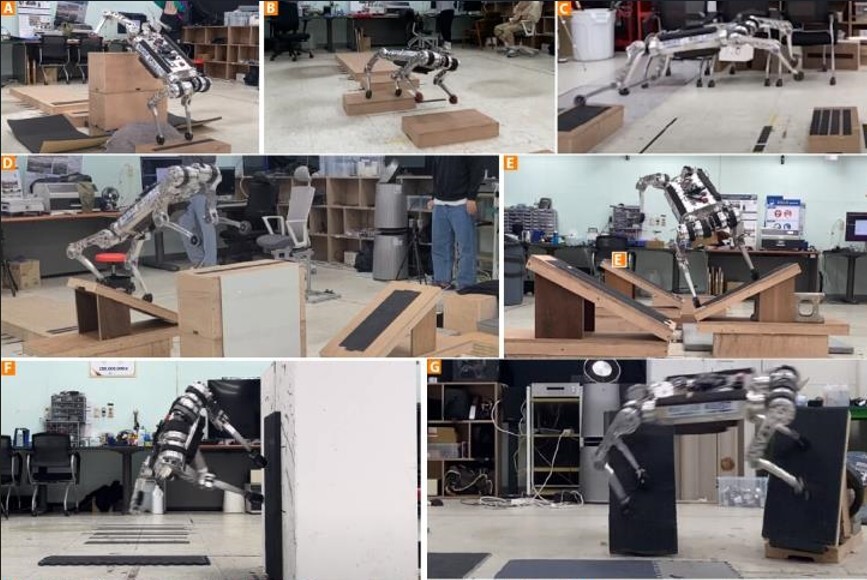
라이보는 이번에 징검다리 위를 시속 14.4㎞로 뛰어넘고, 계단을 올라가며, 수직 벽을 달리는 성능을 입증했다. 연구팀은 고양이의 보행 방식에 착안해 뒷발이 앞발이 밟았던 곳을 디디는 구조를 도입, 발 디딤 위치 계산의 복잡도를 크게 낮췄다. 이어 맵 생성기(map generator)를 이용, 발 디딤 위치를 따라가는 트래킹 학습을 통해 발 디딤 위치의 정확도를 높였다. 연구팀은 라이보가 재난 구조나 군사 정찰, 산악 탐사 등 사람이 접근하기 어려운 환경에 적용해 임무 수행을 할 수 있을 것으로 기대하고 있다.

황보제민 교수는 “기존 상당히 큰 계산량을 요구하던 불연속 지형에서의 고속 내비게이션 문제를 오직 발자국의 위치를 어떻게 선정하는가의 간단한 관점으로 접근, 고양이의 발디딤에서 착안해 계산량을 획기적으로 줄였다”고 설명했다.
앞서 지난해 11월엔 마라톤 풀코스(42.195㎞)를 완주했다. 이번 연구 성과는 국제 학술지 ‘사이언스 로보틱스’ 5월호에 실렸다.
[ⓒ 세계일보 & Segye.com, 무단전재 및 재배포 금지]
![[설왕설래] 미수습 호국영웅 12만1723명](http://img.segye.com/content/image/2025/06/05/128/20250605516860.jpg
)
![[기자가만난세상] ‘포스트 김연경’ 시대의 프로배구](http://img.segye.com/content/image/2025/01/06/128/20250106517368.jpg
)
![[삶과문화] 작가들의 둥지, 예버덩 10년](http://img.segye.com/content/image/2025/06/05/128/20250605517315.jpg
)









